Motion Component (IMU)
The motion hub component allows you to define sensors that read data from inertial measurement units (IMUs)
such as accelerometers and gyroscopes. Not all IMU chips support all types of measurements, see the individual platform
documentation for details.
# Example configuration entrymotion: - platform: ... accelerometer_range: 4G # Platform dependent options here
sensor: - platform: motion type: acceleration_x name: "Accel X" - platform: motion type: angular_rate_x name: "Gyro X" - platform: motion type: pitch name: "Pitch Angle"Configuration variables
Section titled “Configuration variables”Base configuration
Section titled “Base configuration”-
axis_map (Optional, mapping): Remap or invert the physical axes of the sensor to match your board orientation. Each key (
x,y,z) maps to the physical axis it should read from, optionally prefixed with-to invert. All three axes must be present and each physical axis may only appear once. Mutually exclusive withtransform_matrix.# Example: swap X and Y, invert Zmotion:- platform: ...axis_map:x: yy: xz: "-z" -
transform_matrix (Optional, list of floats): A 3×3 transformation matrix applied to raw accelerometer and gyroscope readings. This allows arbitrary calibration beyond simple axis remapping. Can be specified as a flat list of 9 values (row-major order) or as a 3×3 nested list. Mutually exclusive with
axis_map.# Example: 3x3 nested formatmotion:- platform: ...transform_matrix:- [0.998, 0.010, -0.050]- [-0.010, 0.999, 0.020]- [0.050, -0.020, 0.998]# Example: flat formatmotion:- platform: ...transform_matrix: [0.998, 0.010, -0.050, -0.010, 0.999, 0.020, 0.050, -0.020, 0.998]The matrix can be obtained from the runtime calibration actions described below — after calibration the computed matrix is logged in a format that can be copied directly into your configuration for persistent use.
-
update_interval (Optional, Time): The interval at which sensor data is read. Defaults to
250ms. -
id (Optional, ID): Manually specify the ID used for code generation.
Sensor configuration
Section titled “Sensor configuration”- type (Required, string): The type of measurement to expose. One of:
acceleration_x: X-axis acceleration ing.acceleration_y: Y-axis acceleration ing.acceleration_z: Z-axis acceleration ing.angular_rate_x: X-axis angular velocity in°/s.angular_rate_y: Y-axis angular velocity in°/s.angular_rate_z: Z-axis angular velocity in°/s.gyroscope_x: Synonym forangular_rate_x.gyroscope_y: Synonym forangular_rate_y.gyroscope_z: Synonym forangular_rate_z.pitch: Pitch angle in°.roll: Roll angle in°.orientation: Discrete in-plane rotation derived from gravity, reported as0,90,180or270°. While the device lies flat (face up or face down) no value is published.
- flat_threshold (Optional, float): Only used by the
orientationtype. The minimum tilt angle from horizontal, in degrees, before an orientation is reported. While the device is more level than this it is treated as flat and the sensor publishes no value. Defaults to30. - All other options from Sensor.
Binary Sensor
Section titled “Binary Sensor”The motion binary sensor platform reports orientation and movement
states derived from the IMU data. Each binary sensor selects a type and reads from a motion hub.
# Example configuration entrybinary_sensor: - platform: motion type: face_up name: "Face Up" - platform: motion type: free_fall name: "Free Fall"Configuration variables
Section titled “Configuration variables”- type (Required, string): The state to detect. One of:
face_up:ONwhile the device lies roughly horizontal with its Z axis pointing up.face_down:ONwhile the device lies roughly horizontal with its Z axis pointing down.free_fall:ONwhile the device is in free fall (total acceleration near zero).moving:ONwhile the device is being moved or rotated.
- threshold (Optional, float): Detection threshold; its meaning and default depend on
type:face_up/face_down: the maximum tilt from horizontal, in degrees (0–90). Smaller values require the device to be more level. Defaults to30. These two states are only evaluated while the device is at rest; during movement the last reported state is held.free_fall: the total acceleration ingbelow which free fall is detected. Defaults to0.15.moving: the change in acceleration ing(or a proportional change in angular rate) above which motion is detected. Defaults to0.05.
- duration (Optional, Time): Only used by
free_fallandmoving. Forfree_fall, the device must be falling for at least this long before the sensor turnsON; defaults to100ms. Formoving, the sensor staysONfor at least this long after the last detected motion; defaults to2s. - motion_id (Optional, ID): The ID of the
motionhub to read from. Only required when more than onemotionhub is configured. - All other options from Binary Sensor.
The motion event platform fires events for gesture-like motions. It exposes a
single event type, shake, triggered by a sharp change in acceleration.
# Example configuration entryevent: - platform: motion name: "Shake"Configuration variables
Section titled “Configuration variables”- threshold (Optional, float): The change in acceleration between successive readings, in
g, above which a shake is detected. Lower values make detection more sensitive. Defaults to0.5. - cooldown (Optional, Time): The minimum time between
consecutive
shakeevents. Defaults to500ms. - motion_id (Optional, ID): The ID of the
motionhub to read from. Only required when more than onemotionhub is configured. - All other options from Event.
Actions
Section titled “Actions”motion.calibrate_level Action
Section titled “motion.calibrate_level Action”This action computes a calibration matrix so that the
current accelerometer reading maps to [0, 0, 1] (device flat, Z pointing up). Place the
device on a level surface and trigger this action. It replaces the current transform_matrix.
- save (Optional, boolean): Save the resulting matrix to NVS flash so it is
automatically restored on the next boot. Defaults to
false. - on_success (Optional, Automation): Actions to run when calibration succeeds.
- on_error (Optional, Automation): Actions to run when calibration fails (e.g. sensor read failure or insufficient tilt).
on_...: then: - motion.calibrate_level: id: my_motion save: true on_success: - logger.log: "Level calibration succeeded" on_error: - logger.log: "Level calibration failed"After execution the resulting matrix is logged at INFO level in a format that can be
copied into the transform_matrix configuration for persistent calibration.
motion.calibrate_heading Action
Section titled “motion.calibrate_heading Action”This action corrects the heading (rotation around Z) after a prior level calibration. Tilt the device around its Y axis only (pitch forward or backward) and trigger this action. It composes a Z-rotation correction with the existing matrix so that the horizontal acceleration component falls entirely on the X axis, with its sign preserved.
- save (Optional, boolean): Save the resulting matrix to NVS flash. Defaults to
false. - on_success (Optional, Automation): Actions to run when calibration succeeds.
- on_error (Optional, Automation): Actions to run when calibration fails.
on_...: then: - motion.calibrate_heading: id: my_motion save: true on_success: - logger.log: "Heading calibration succeeded"motion.clear_calibration Action
Section titled “motion.clear_calibration Action”This action discards any runtime calibration and restores
the build-time matrix defined by axis_map or transform_matrix (or the identity matrix if
neither is configured). Use it to undo a motion.calibrate_level / motion.calibrate_heading
sequence without re-flashing.
- save (Optional, boolean): Also clear the saved calibration in NVS flash so the reset
persists across reboots. Defaults to
false. Whenfalse, the in-memory matrix is reset but a previously saved calibration will be restored again on the next boot.
on_...: then: - motion.clear_calibration: id: my_motion save: trueCalibration persistence
Section titled “Calibration persistence”When a calibration action is run with save: true, the resulting matrix is stored in NVS flash
and automatically restored on the next boot, taking precedence over the axis_map /
transform_matrix configuration. The saved calibration is tied to the configured base matrix:
if you change axis_map or transform_matrix and re-flash, the stale saved calibration is
automatically discarded and the new configuration is used. To explicitly return to the
configured base at runtime, use motion.clear_calibration.
Calibration procedure
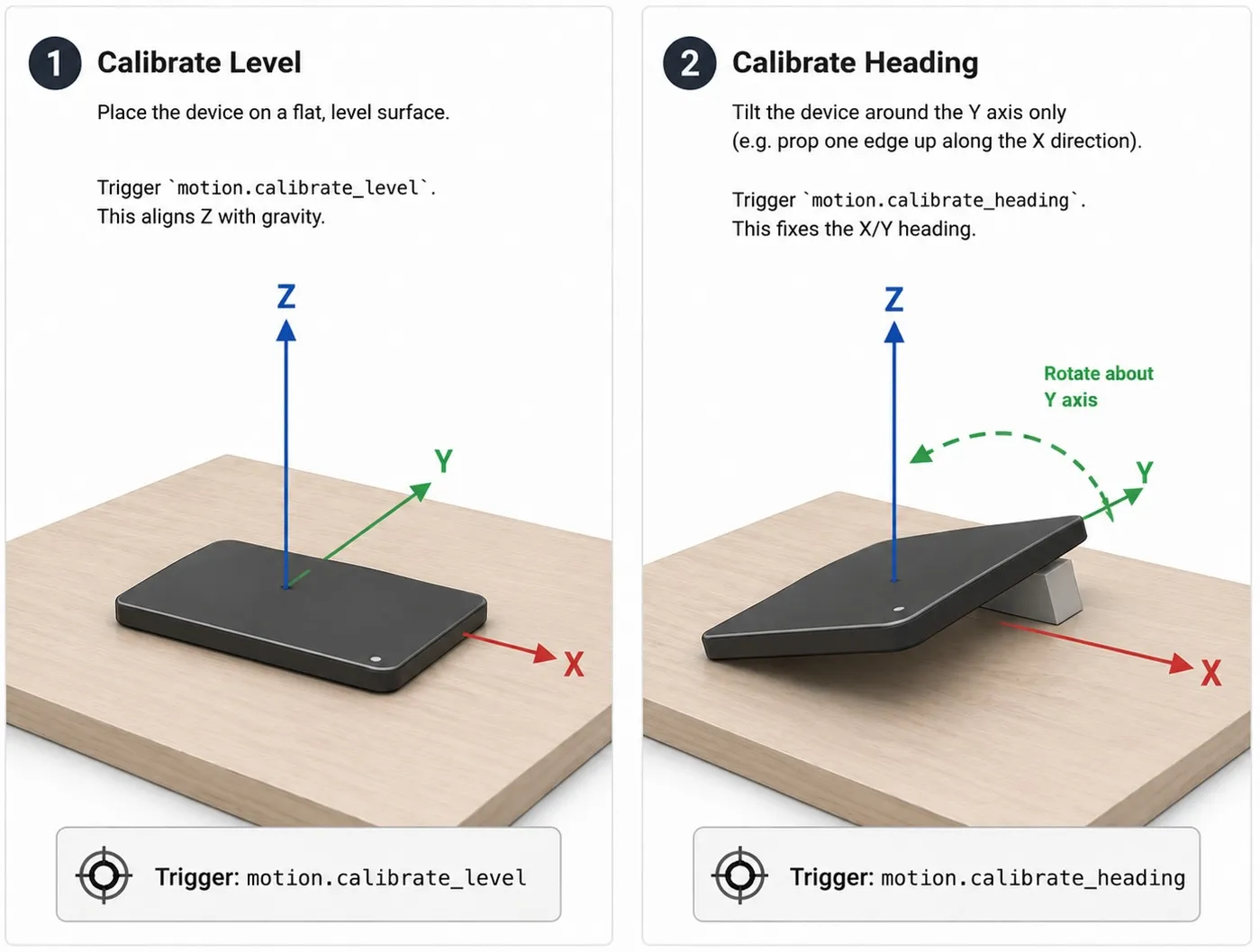
Section titled “Calibration procedure”- Place the device on a flat, level surface.
- Trigger
motion.calibrate_level. This aligns Z with gravity. - Tilt the device around the Y axis only (e.g. prop one edge up along the X direction).
- Trigger
motion.calibrate_heading. This fixes the X/Y heading.
The new calibration matrix is now active and can be saved to flash if desired. If you have a way to monitor the logs, you can verify that the calibration succeeded by checking for an INFO log entry with the resulting matrix in a format suitable for copy-pasting into your configuration.